Find NPTEL Advanced Robotics Week 6 answers at nptel.answergpt.in. Our expert-verified solutions simplify complex topics, enhance your understanding of key concepts, and improve your assignment accuracy with confidence.
✅ Subject: Advanced Robotics
📅 Week: 6
🎯 Session: NPTEL 2025
🔗 Course Link: Advanced Robotics
🔍 Reliability: Verified and expert-reviewed answers
Use these answers as a reference to cross-check your solutions. For complete, step-by-step solutions across all weeks, explore [Week 1-12] NPTEL Advanced Robotics Assignment Answers 2025.
🚀 Stay ahead in your NPTEL journey with fresh, updated solutions every week!
| Week-by-Week NPTEL Advanced Robotics Assignments in One Place |
|---|
| Advanced Robotics Week 1 Answers |
| Advanced Robotics Week 2 Answers |
| Advanced Robotics Week 3 Answers |
| Advanced Robotics Week 4 Answers |
| Advanced Robotics Week 5 Answers |
| Advanced Robotics Week 6 Answers |
| Advanced Robotics Week 7 Answers |
| Advanced Robotics Week 8 Answers |
| Advanced Robotics Week 9 Answers |
| Advanced Robotics Week 10 Answers |
| Advanced Robotics Week 11 Answers |
| Advanced Robotics Week 12 Answers |
NPTEL Advanced Robotics Week 6 Assignment Answers 2025
1. Inertia tensor matrix represents
- Distribution of force of a rigid body relative to a reference frame
- Distribution of mass of a rigid body relative to one another
- Distribution of mass of a rigid body relative to a reference frame
- Angular momentum of a rigid body
Answer :- For Answers Click Here
2. In the Newton-Euler method, the outward iterations are used to find
- Moment about the base frame.
- Inertial force of a link.
- Force acting at every joint.
- Torque acting at every joint.
Answer :- For Answers Click Here
3. In the Newton-Euler method, the inward iterations are used to find
- Inertial force.
- Inertial torque.
- Joint velocities.
- Joint torques.
Answer :-
Introduction to Machine Learning Week 6 NPTEL Assignment Answers 2025
4. The Newton-Euler method is a
- force-based method.
- energy-based method.
- both force-based and energy-based methods.
- minimum energy criteria method.
Answer :-
5. The Lagrange-Euler method is a
- momentum-based method.
- energy-based method.
- both force-based and momentum-based methods.
- minimum energy criteria method.
Answer :-
6. In the Lagrange-Euler method, a scalar function called the Lagrangian is
formed that is equal to the
- Sum of kinetic energy and potential energy of each link.
- Difference between kinetic energy and potential energy of each link.
- Difference between total energy and potential energy of each link.
- Sum of total energy and potential energy of each link.
Answer :- For Answers Click Here
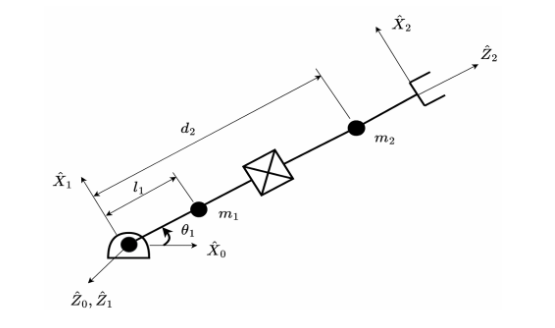
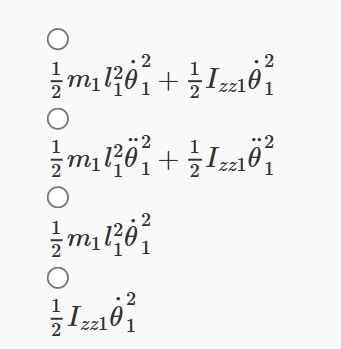
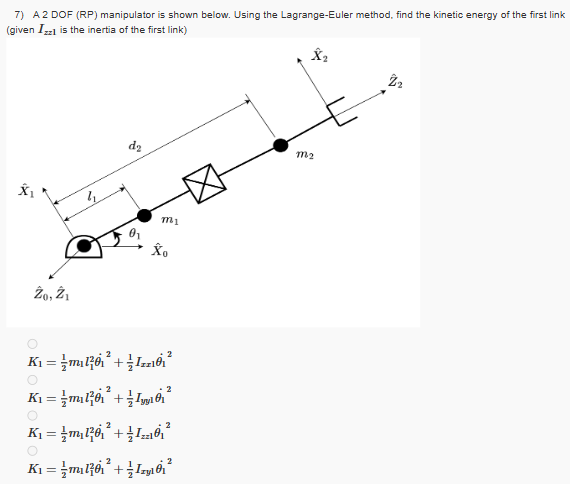
7. A 2 DoFs (RP) is shown below. Using the Lagrange-Euler method find the
kinetic energy of the first link (given Izz1 is the inertia of the first link)
Answer :-
8. The potential energy of the second link in Q7 is (d2max is the maximum travel)
- m2gd2sinθ1
- m2gd2max
- m2gd2maxsinθ1+m2gd2max
- m2gd2sinθ1+m2gd2max
Answer :-
9. The dynamics equation of a serial manipulator is a
- non-linear de-coupled differential equation.
- linear coupled differential equation.
- non-linear coupled differential equation.
- linear de-coupled differential equation.
Answer :-
10. The dynamics equation is made up of
- inertia, coriolis, centrifugal, gravitational terms only.
- coriolis, centrifugal, gravitational terms only.
- inertia,centrifugal, gravitational terms only.
- inertia, coriolis, centrifugal terms only.
Answer :- For Answers Click Here
Advanced Robotics Week 6 NPTEL Assignment Answers 2024
1. The mass distribution of a rigid body relative to a reference frame is represented by the
- sum of mass moment of inertia of individual links
- Inertia Vector
- sum of masses of individual links
- Inertia Tensor
Answer :- d
2. In the Newton-Euler method, the outward iterations are used to find
- position of the end effector
- joint torques
- forces acting at the CG of the links
- momentum of the links of the robot
Answer :- c
3. In the Newton-Euler method, the inward iterations are used to find the
- joint accelerations
- joint velocities
- joint torques
- joint positions
Answer :- c
4. The Newton-Euler method is a
- force based method
- energy based method
- velocity based method
- momentum based method
Answer :- a
5. The Lagrange-Euler method is a
- force based method
- energy based method
- velocity based method
- momentum based method
Answer :- b
6. In the Lagrange-Euler method, a scalar function called the Lagrangian is formed that is equal to the
- sum of kinetic energy of each link
- sum of potential energy of each link
- difference between the sum of kinetic energy for all the links and the sum of potential energy for all the links
- sum of kinetic and potential energy of each link
Answer :- c
7.
Answer :- c
8. The potential energy of the second link in Q7 is (d2max
is the maximum travel)
- u2=(m1+m2)gd2sinθ1+m2gd2max
- u2=m2g(d2−l1)sinθ1+m2gd2max
- u2=m2gd2sinθ1+m2gd2max
- u2=(m1+m2)g(d2−l1)sinθ1+m2gd2max
Answer :- c
9. The dynamic equation of a serial manipulator is a
- non linear coupled differential equation
- linear coupled differential equation
- non linear non coupled differential equation
- linear non coupled differential equation
Answer :- c
10. The total dynamic equation is made up of
- inertia and external force terms
- inertia and gravity terms
- inertia, coriolis and centrifugal terms
- inertia, coriolis, centrifugal and gravity terms
Answer :- d
Conclusion:
In this article, we have uploaded the Advanced Robotics Week 6 NPTEL Assignment Answers. These expert-verified solutions are designed to help you understand key concepts, simplify complex topics, and enhance your assignment performance. Stay tuned for weekly updates and visit www.answergpt.in for the most accurate and detailed solutions.